
Los robots humanoides pronto podrían moverse de una manera mucho más realista, e incluso bailar como nosotros, gracias a un nuevo marco de software para rastrear el movimiento humano.
Desarrollados por investigadores de UC San Diego, UC Berkeley, MIT y Nvidia, «Exbody2» es una nueva tecnología que permite a los robots humanoides realizar movimientos realistas basados en escaneos detallados y visualizaciones de humanos.
Los investigadores esperan que los futuros robots humanoides puedan realizar una gama mucho más amplia de tareas imitando los movimientos humanos con mayor precisión. Por ejemplo, el método de enseñanza podría ayudar a los robots a operar en roles que requieren movimientos finos, como recuperar artículos de los estantes, o moverse con cuidado alrededor de humanos u otras máquinas.
Exbody2 trabaja tomando movimientos simulados basados en escaneos de captura de movimiento de humanos y traducirlos en datos de movimiento utilizables para que el robot se replique. El marco puede replicar movimientos complejos utilizando el robot, lo que permitiría a los robots moverse con menos rígidamente y adaptarse a diferentes tareas sin necesidad de reentrenamiento extenso.
Relacionado: 8 de los robots más extraños del mundo en este momento
Todo esto se enseña utilizando el aprendizaje de refuerzo, un subconjunto de aprendizaje automático en el que el robot se alimenta con grandes cantidades de datos para garantizar que tome la ruta óptima en cualquier situación dada. Las buenas salidas, simuladas por los investigadores, se les asigna puntajes positivos o negativos para «recompensar» el modelo de resultados deseables, lo que significó replicar los movimientos con precisión sin comprometer la estabilidad del bot.
El marco también puede tomar clips a corto plazo, como unos pocos segundos de baile, y sintetizar nuevos marcos de movimiento de movimiento para referencia, para permitir que los robots completen los movimientos de mayor duración.
Bailando con robots
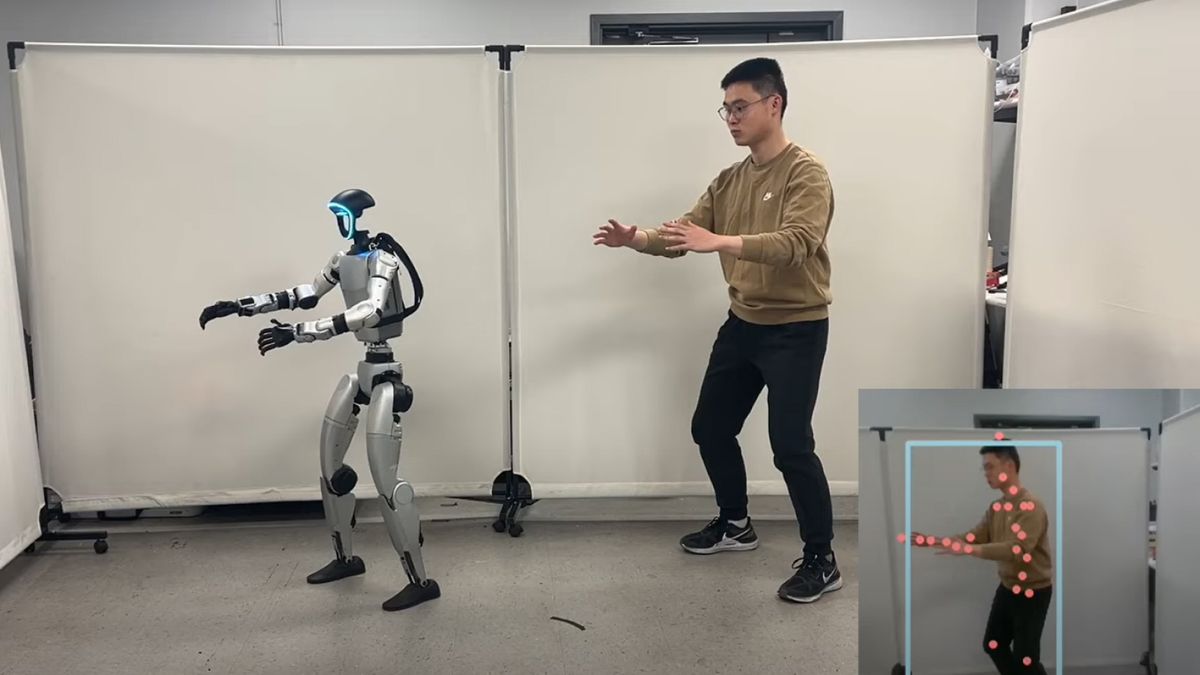
En Video publicado en YouTubeUn robot entrenado a través de Exbody2 baila, spars y ejercicios junto con un sujeto humano. Además, el robot imita el movimiento de un investigador en tiempo real, utilizando un código adicional titulado «Hybrik: cinemática inversa analítica híbrida-neural para la recuperación de la malla corporal» desarrollado por el grupo de visión e inteligencia de la máquina en la Universidad Shanghai Jiao Tong.
En la actualidad, el conjunto de datos de Exbody2 se centra en gran medida en los movimientos de la parte superior del cuerpo. En un estudio, subido el 17 de diciembre de 2024 al servidor de preimpresión ArxivLos investigadores detrás del marco explicaron que esto se debe a las preocupaciones de que la introducción de demasiado movimiento en la mitad inferior del robot causará inestabilidad.
«Las tareas demasiado simplistas podrían limitar la capacidad de la política de capacitación para generalizar a nuevas situaciones, mientras que las tareas demasiado complejas pueden exceder las capacidades operativas del robot, lo que lleva a resultados de aprendizaje ineficaces», escribieron. «Parte de la preparación de nuestro conjunto de datos, por lo tanto, incluye la exclusión o modificación de entradas que presentaban movimientos complejos de la parte inferior del cuerpo más allá de las capacidades del robot».
El conjunto de datos de los investigadores contiene más de 2.800 movimientos, con 1.919 de estos provenientes del archivo de captura de movimiento como formas de datos de formas de superficie (amas). Este es un gran conjunto de datos de movimientos humanos, incluidos más de 11,000 movimientos humanos individuales y 40 horas de datos de movimiento detallados, destinados a un aprendizaje profundo no comercial, cuando una red neuronal está entrenada en grandes cantidades de datos para identificar o reproducir patrones.
Habiendo probado la efectividad de Exbody2 para replicar el movimiento humano en los robots humanoides, el equipo ahora recurrirá al problema de lograr estos resultados sin tener que curar manualmente conjuntos de datos para garantizar que solo haya información adecuada disponible para el marco. Los investigadores sugieren que, en el futuro, la recopilación de conjuntos de datos automatizados ayudará a suavizar este proceso.



{kind=link}